随着越来越多汽车品牌将智能驾驶部署到主销车型上,自动驾驶技术正沿着大规模前装量产的路线大踏步前进,并以更快的速度走向更大范围的普及。
在这样的背景下,如何高效完成技术方案的量产落地,满足多项目、多车型的多样化量产需求,也就成为了自动驾驶商业化走向成熟的关键。它不同于面向一两个车型的量产开发,而是一系列的大规模、多样化应用,对商业和技术有着更高的要求。当中,软件算法的平台化尤为重要。
在Nullmax看来,通过平台化将自动驾驶所需的绝大部分软件算法,尤其是核心的、复杂的算法模型,整合为一套支持不同车型的平台型软件,可以免去大量低价值的重复开发,大幅提高量产速度和质量。而感知作为最关键的上游环节,它的平台化是整个平台化工作的重中之重。
为此,Nullmax打造了涵盖L2+及L4感知任务的平台化感知架构,它可以支持大算力、小算力的不同计算平台,也能自动适配不同的传感器配置,为行泊一体等产品应用的高效落地提供核心的技术支撑。
细说感知平台化
感知平台化,简单来说就是设计一套感知基础架构,将感知所需的软件算法整合成一个可以支持各种需求的平台。它能够快速、低成本地输出针对不同传感器和芯片的软件包,在不同车型上实现自动驾驶的相关功能。

平台化有利于提升量产的质量和速度
在行业内,感知平台化刚刚起步,为每一款车型配备一个开发团队,开发一套专用的软件包,是最普遍的量产方式。「技术密集型」的自动驾驶,不得不以「劳动密集型」的方式开展工作,甚至「重复造轮子」,这样既耗费了稀缺的人才资源,拉长了量产周期,也无益于自动驾驶数据的整合与利用,难以为技术带来质的提升。
当前,部分优秀企业已经可以实现基础的感知平台化效果,为不同芯片开发不同感知方案,以稍低一些的开发成本实现感知算法的移植。但显然,自动驾驶的感知平台化需要更加充分一些,为商业和技术带来更大进步。
比如在商业层面,感知平台化可以将量产的边际成本压缩到极致,从而在不大幅增加人员和投入的情况下,完成大量新车型上的应用。这可以帮助自动驾驶形成真正成熟可闭环的商业模式,尤其是量产需要关注单位车型、单位功能的研发成本,平台化能最大程度地帮助车厂分摊各项成本。
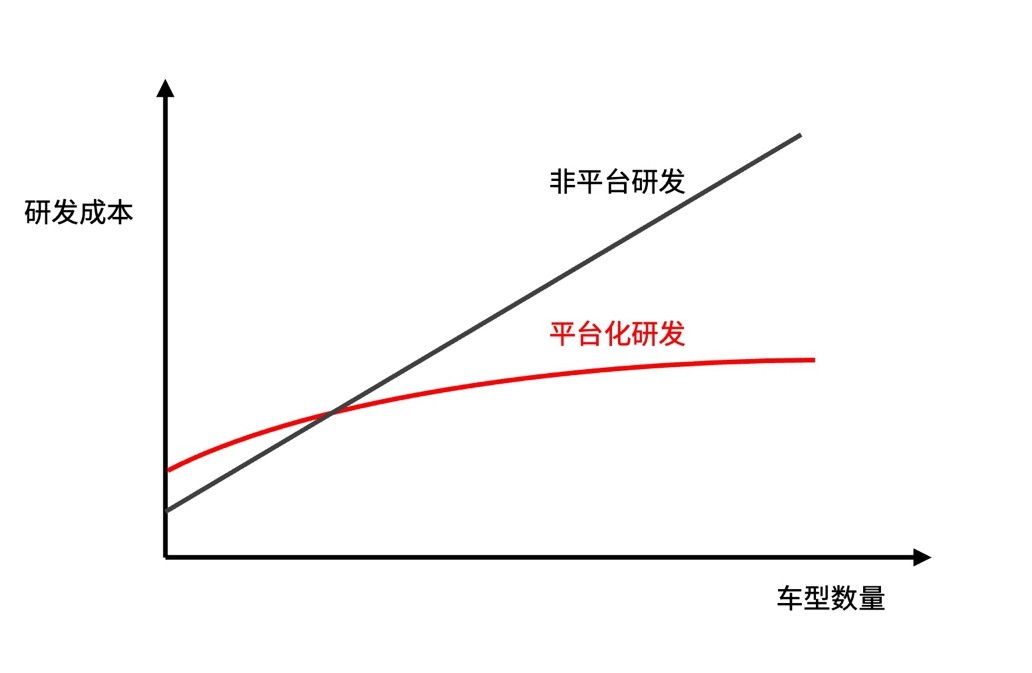
平台化可显著降低应用的边际成本
而从技术层面来讲,感知平台化也有助于汇集不同项目、不同级别、不同任务的自动驾驶数据,促进彼此效果,提升整个感知平台的各方面任务性能。无论是适配的哪套方案,都可以为整个感知平台贡献数据和知识,让自身算法和相关算法持续进步。
多样差异带来巨大挑战
感知平台化对于自动驾驶的应用来说意义重大,但面临的挑战也同样巨大。
因为在实际的量产中,不同项目的传感器、计算平台和功能普遍存在差异,用一套感知平台适配所有的功能情况和硬件情况显然极为不易。
平台化需充分考虑需求和硬件差异
具体来说,传感器作为自动驾驶的感官硬件,它的配置差异直接影响着整个感知系统的设计和具体感知算法的开发。虽然在实际应用中,有些车型的传感器类型、数量甚至安装位置看起来一模一样,但视场角、像素、焦距、旋转方向等参数可能大不相同,与相机参数高度关联的算法需要大幅调整甚至是重新开发才能使用。
芯片作为算法运行的基础硬件,它在算力、算子、处理器核心等方面存在的差异,也进一步拔高了感知平台化的难度。感知平台化意味着既要考虑大算力的芯片,也要考虑低算力芯片。而且芯片算子不同,那么能部署的算法也不一样。加之自动驾驶芯片通常是多核异构SOC,所以也要考虑处理器核心的不同。
另外,算法服务于具体的功能,因此感知平台化需要考虑不同算法以实现各种功能需求。比如一些基础功能只需要2D的车道线检测、障碍物检测,但是一些高阶功能需要3D的检测算法,还有稠密深度图等等。并且有的厂商还会开发一些特色功能,比如轨迹参考线、360°障碍物检测等等,那么可能会用到BEV感知、BEV规划等算法。
显而易见,感知平台化是一项难度极大的系统性工程,但在突破了这些难点之后,自动驾驶量产也能取得巨大的效率优势,在商业和技术上走得更远。
BEV-AI架构实现感知平台化
感知平台化需要完成多方面的工作,其中核心的就是技术架构,而技术架构最核心的就在于模型架构。为此,Nullmax打造了平台化的BEV-AI自动驾驶技术架构,为感知提供One Model形态的模型架构,用一个可以灵活适配的模型支持所有感知任务,满足不同自动驾驶应用的感知需求,实现整个感知系统的平台化。

Nullmax感知平台化的模型架构示意
简单来说,Nullmax的模型架构会先将来自前视、周视等相机的数据输入到主干网络,然后根据输出的一系列结果推进后续的任务。最直接的就是,主干网络提取的信息,可以直接通过CNN模型输出目标检测、车道线检测、语义分割、深度图、位姿估计等任务的结果。
与此同时,主干网络输出的一系列特征,还会进入到另一个Memory Bank的视频模块,通过Transformer网络在BEV空间输出目标检测、分割、特征、自车轨迹等信息。最终,CNN模型部分的输出,Transformer模型部分的输出,融合为统一的结果,供下游使用。
Nullmax感知模型架构的一大特点是存在很多功能重复的任务分支,这可以帮助网络取得更好的训练效果,从而实现更好的算法性能。因为在多任务共同训练的时候,不仅每个任务分支能帮助主干网络学习新的知识,分支之间也能起到相互促进的作用,胜过单独训练的方式。
比如,基于CNN的2D目标检测、3D目标检测和基于Transformer的BEV目标检测,基于CNN的2D车道线检测、3D车道线检测和基于Transformer的BEV车道线检测、BEV分割,这些任务之间高度相通,那么共同训练时可以在知识上互通有无,帮助彼此达到更好性能。
而且很关键的是,Nullmax的冗余分支设计可以确保每种任务有两到三个的输出信号,当中有的分支算力要求较高,有的要求较低,这样在实际部署时就可以灵活选择。
因此,基于这套感知平台架构,Nullmax既可以提供高算力方案,功能体验瞄准L4,又可以提供中低算力方案,满足主流L2+功能需求。典型例子就是Nullmax的MaxDrive行泊一体方案,既可以部署在大算力的Orin平台上,也可以基于8T算力的TDA4VM平台量产,各个算力区间都能有最优的功能选择。
在算力非常充沛的情况下,这个架构可以不做裁剪,完整部署。既以CNN网络完成感知输出,又以Transformer网络完成感知输出。不同网络的结果,融合之后作为最后的感知结果,确保整个系统的准确性、鲁棒性和冗余性。
如果算力较低,比如一些仅有前视相机的方案,那么可以只保留主干网络和部分任务分支,去掉其他任务,推理时仅运行前视部分,然后完成感知融合。而在极限情况下,比如2T的芯片上,那么可以仅保留2D车道线检测和2D目标检测,并对主干网络进行剪枝,也能组建一套极简的感知方案。
另外,Nullmax也同步构建了One Cycle形态的数据闭环,与One Model形态的模型架构搭配协同。这样在完成量产部署之后,Nullmax感知平台输出的不同方案可以通过同一套数据闭环高效汇流,回传知识给共用的主干网络和关联的任务分支,让整个感知基础模型变得更加强大。
(结语)
感知平台化不仅可以成倍提升量产效率,而且能够为算法效果带来质的改变。在实际的量产当中,Nullmax正是凭借高效的平台化软件算法,保证多个量产项目的同步开发和交付,助力行业的智能化升级。
